LA36
Extremely powerful linear actuator made by LINAK. Up to 6,800 N load, or up to 160 mm/s. Designed to operate in extreme conditions. A solid choice for industrial and agricultural applications.- Max. load: 6,800 N
- Max. speed: 160 mm/s
- Stroke length: 100-1200 mm
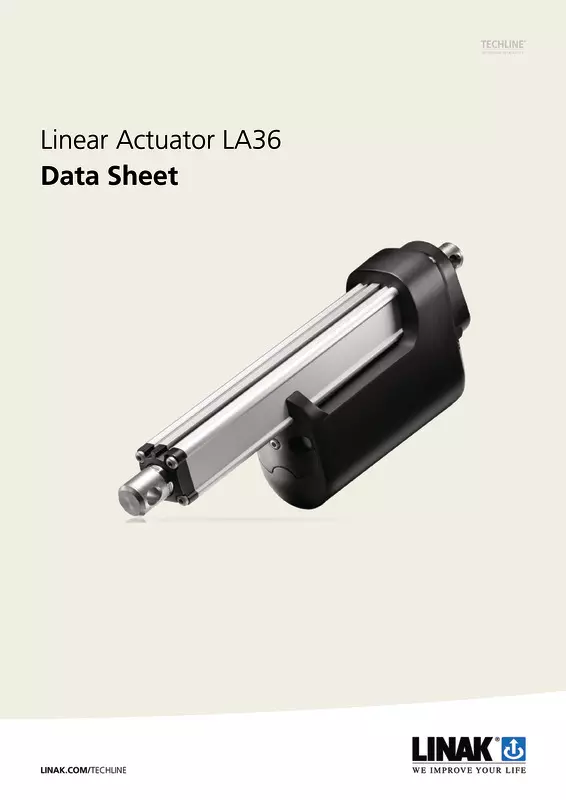
LA36
The actuator LA36 is one of our most robust and powerful electric actuators, designed to operate under extreme conditions.
The LA36 is a maintenance-free actuator with a long service life and a high IP rating, available with an optional ATEX/IECEx approval for use in dust-explosive environments. You can also get this actuator as an Off-highway variant, designed for agricultural machinery and other off-highway applications.
This high-quality actuator offers a very strong alternative to hydraulic solutions.
- Max. load: 6,800 N
- Max. speed: 160 mm/s
- Stroke length: 100-1200 mm
- Motor voltage: 12 V, 24 V, 36 V and 48 V
- IP ratings: IP66 dynamic and IP69K static
The LA36 is part of the IC Integrated Controller™ range, designed to integrate seamlessly with existing control systems in both industrial and off-highway applications. It offers a variety of industrial interfaces for smart and reliable movement.
You can choose the universal LINAK® I/O™ interface or select from a comprehensive range of communications protocols, including:
Fieldbus:
Industrial Ethernet:
Additionally, several of these options include Danfoss PLUS+1® Compliance.
Learn more about actuators with IC – Integrated Controller™.
Product and communications options








2D/3D
Lifetime prediction
Downloads

I/O™ Interface User Manual
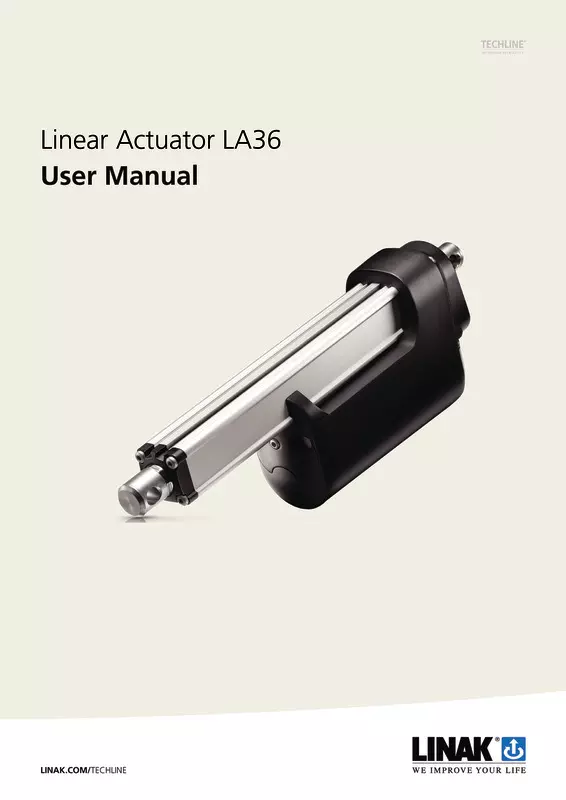
LA36 actuator User Manual
Integrated Controller User Manual
CANopen® User Manual
EtherNet/IP™ User Manual
IO-Link® User Manual
Modbus® RTU User Manual
Modbus® TCP/IP User Manual
PROFINET User Manual
Standard interface User Manual
CAN SAE J1939® User Manual

CANopen® User Manual - Legacy Version

CAN SAE J1939® User Manual – version 1

CAN SAE J1939® User Manual – version 3

I/O™ interface
The LINAK I/O interface is the definition of flexibility offering endless modifications to give you full control of the exact functionalities you need.
Actuator Connect configurator
Digital products
LINAK Actuator Connect configurator helps you configure actuators with IC Integrated Controller™. Adjust parameters such as start/stop settings, virtual limits, and current limits, and read-out real-time and historical usage data.
- Flexible prototyping
- Analyse performance
- In-depth troubleshooting
LA33
Linear actuators
The linear actuator LA33 from LINAK combines compact design with powerful performance. Available with high-speed option, I/O and low-noise gear option for even more customisation possibilities in demanding applications.
- Max. load: 5,000 N
- Max. speed: 70 mm/s
- Stroke length: 100-600 mm
LA37
Linear actuators
Extremely powerful linear actuator able to create reliable movement even in very harsh environments. It comes with LINAK IC Integrated Controller™ and a wide range of industrial control interfaces.
- Max. load: 15,000 N
- Max. speed: 10 mm/s
- Stroke length: 100-600 mm
LA77
Linear actuators
Powerful electric linear actuator designed to handle high loads and demanding environments. It delivers long-lasting reliability as well as a wide choice of industrial interfaces.
- Max. load: 15,000 N
- Max. speed: 7 mm/s
- Extended service life
LA76
Linear actuators
Versatile electric linear actuator that delivers both robustness and long-term reliability. It excels in challenging environments and is a wise choice for a wide array of industrial machinery and applications that require high-level performance.
- Max. load: 6,800 N
- Max. speed: 142 mm/s
- Extended service life
Solutions for tractors
Electric actuators from LINAK help adjust ladders, mirrors and the engine bonnet on your tractor, as well as provide safe movement for all attachable applications.
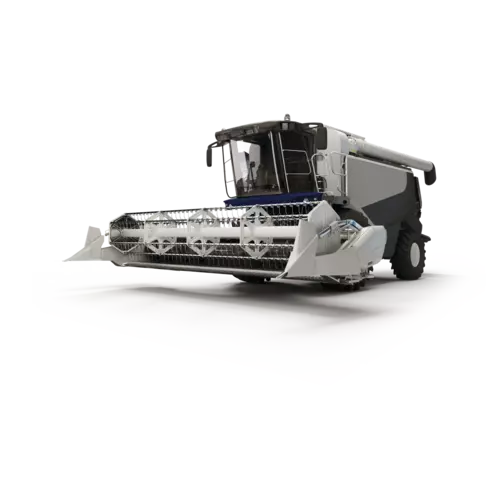
Combine harvester solutions
LINAK electric actuators help adjust everything from ladders and covers to headers, concave and cutters on combine harvesters.
Forage harvester solutions
LINAK electric actuators allow optimal positioning of crop accelerators and corn crackers, and provide perfect ergonomics in forage harvesters.
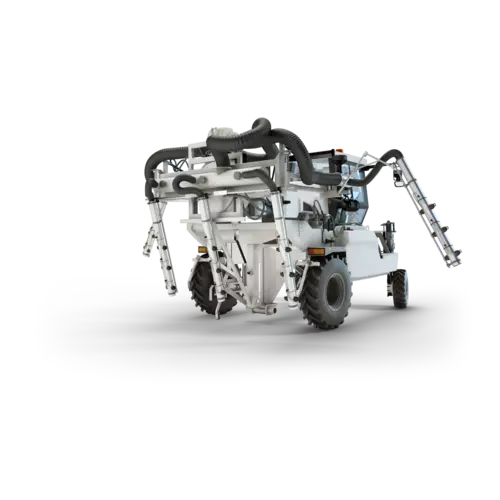
Solutions for sprayers
LINAK electric actuators help raise and lift ladders and hoods as well as adjust nozzles and arms on modern agricultural sprayers.
Solutions for spreaders
LINAK intelligent actuator solutions help provide sophisticated control and precision for fertiliser spreaders in modern agriculture.
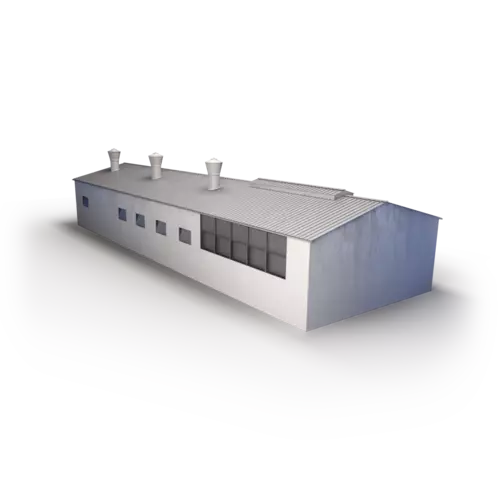
Grain handling systems
LINAK actuator solutions allow remote monitoring and control of doors, valves and inlets on grain facilities and make optimal commodity products.
Wheel loader solutions
LINAK actuators provide advanced motion control for hood lifts, steps and footboards as well as position feedback for seats and steering wheels.
Climate control systems
Intelligent electric actuator solutions integrate with the stable climate system to ensure perfect temperature, humidity and fresh airflow to keep livestock healthy.
Ventilation systems for farming
Electric actuator systems help keep livestock healthy inside stables and farming facilities, securing fresh air intelligently balanced with outside weather conditions.
Feeding automation systems
Integrating intelligent electric actuators in a feeding automation system allows farmers to specify feed supply and monitor livestock during feeding time.
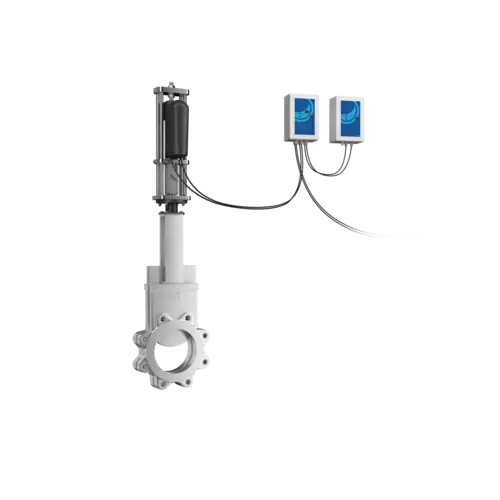
Wastewater treatment
LINAK actuator solutions help you maximise uptime in automated valves for wastewater treatment.
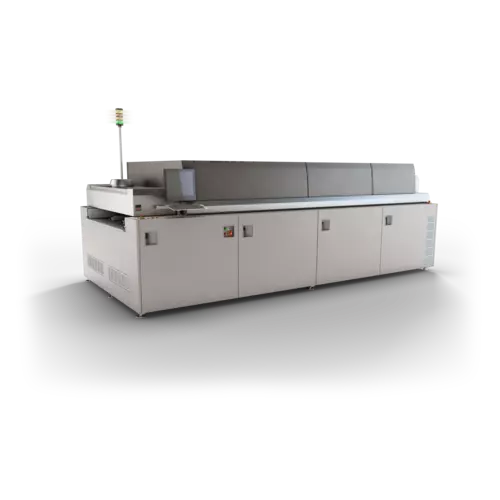
Systems for soldering ovens
Actuator systems from LINAK help move hoods and doors to ventilate hot air from your soldering oven, while keeping your employees safe.
Packaging machines
LINAK electric actuators provide intelligent automation of packaging processes by adjusting machinery to fit various product shapes and sizes.
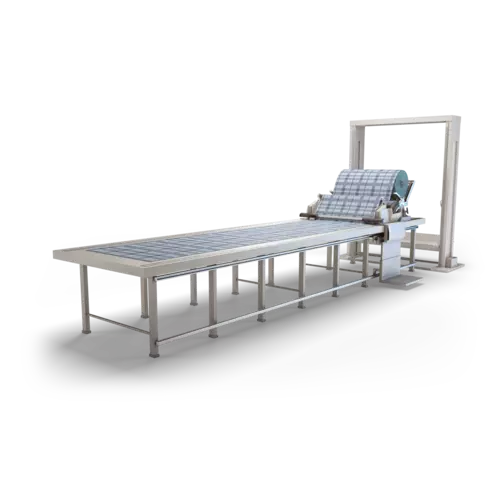
Textile machine solutions
LINAK actuators allow for monitoring and precise aligning of cradles and accurate stacking of fabric in textile machines.
Bar feeders
LINAK actuators help adjust height and provide accurate loading of bars in modern bar feeders.
Food and beverage automation
LINAK actuator solutions improve ergonomics in work tables and help tilt and open lids on cooking kettles, dishwashers and large frying pans in industrial kitchens.
Lawn mowers
LINAK actuators provide automated precision adjustment of mower decks, reels, and baffles, as well as improved ergonomics for operators.
Solutions for wind energy
Intelligent actuators from LINAK help open access gates, hatches and lubrication systems on wind turbines and ensures safety around brakes, locks and ventilation.
Solutions for solar tracking applications
Intelligent actuators from LINAK help solar panels follow the sun across the sky and give feedback to ensure a clear measurement.
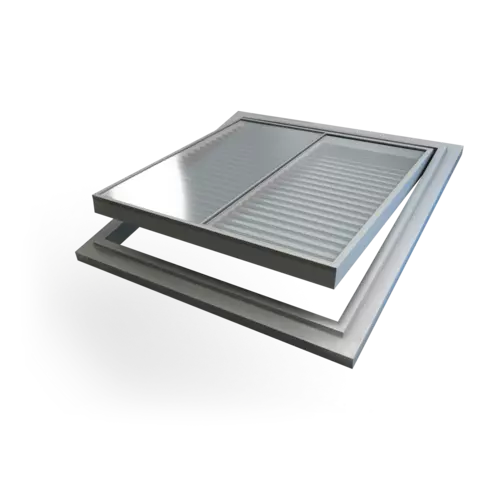
Building louvres
LINAK electric actuators help improve indoor climate in buildings by controlling sunlight. This means less energy used on cooling and heating systems.
Actuator solutions for yachts
LINAK actuators help yacht owners control everything from skylights, engine hatches, and braces to adjusting seats and bathing platforms.
Disability vehicles
LINAK electric actuators provide smooth and low-noise movement of tailgates, wheelchair ramps, and lifts for disability vehicles.
Solutions for balers
LINAK actuator solutions help provide precise position and overall efficiency for balers in modern agriculture.
Pallet truck solutions
LINAK actuators help raise or lower the forks of a pallet truck.
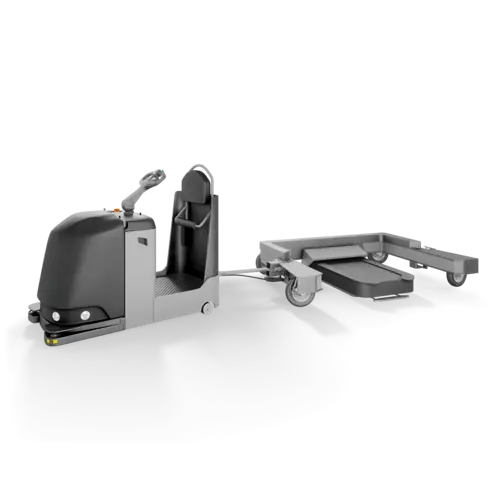
Tugger train solutions
LINAK actuators help lift and drop or fix load carriers on tugger train trailers.
Unit load mobile robot solutions
LINAK offers a wide portfolio of actuators for unit load mobile robots with lifting units.
Goods-to-Person robot solutions
LINAK actuators help raise and lower the lifting deck of mobile robots to pick and drop racks or shelves in Goods-to-Person automated warehouses.